研究内容Research
研究題名
広大な農地の短時間観測を可能とする固定翼UAVを用いた
画像伝送技術の研究開発
1.背景
北海道は広大な農地を有し、1農家あたりの農地面積は全国平均の14倍の26.5haもあり,必要な時に手軽に状況を把握するのにはコストがかかります。そこで,UAVを利用した長時間の観測飛行が必要となります.
2.研究目的
広大な農地を短時間観測するために高速・短時間飛行可能な固定翼自律UAVを用いた映像伝送システムの研究を行います.その為には以下の検討が必要となります.
①遠隔監視制御系
②緊急時帰還飛行経路
③固定翼UAVのペイロード
3.概略
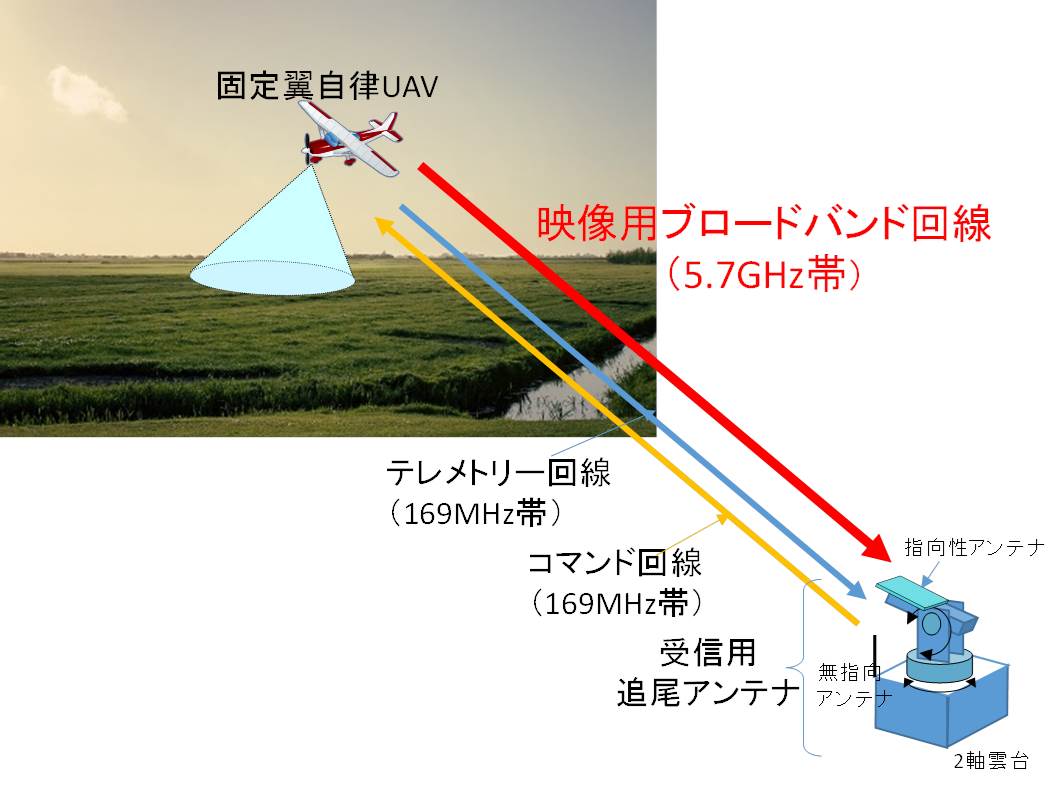
固定翼UAVを用いて,下記のようなイメージで広大な敷地を観測することを想定しています.
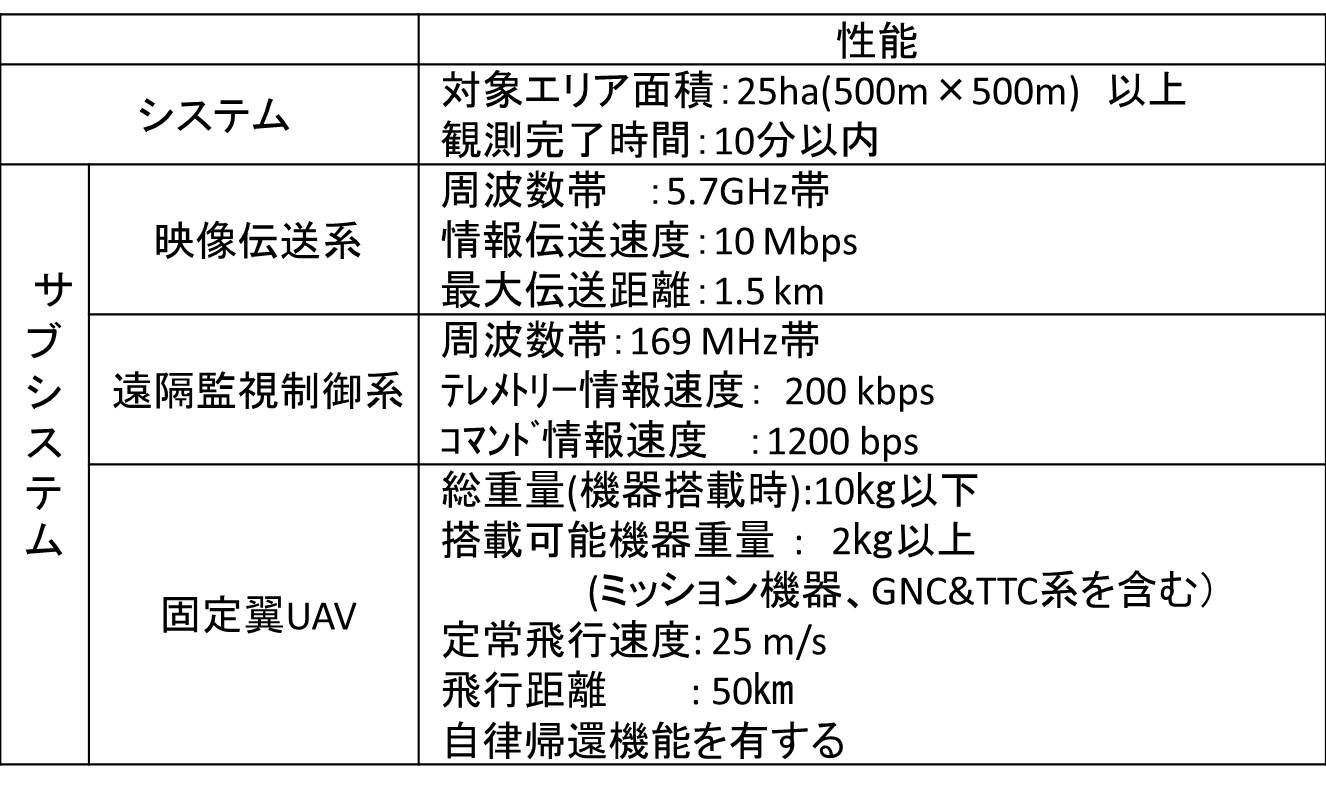
0.5~1mの分解能で農作物の生育状況を把握するためには,1枚の静止画像として復元するために,システムとして、以下の目標を達成します。
広大な敷地の映像伝送システムイメージ
4.映像伝送システムの目標性能
映像伝送システムの目標値

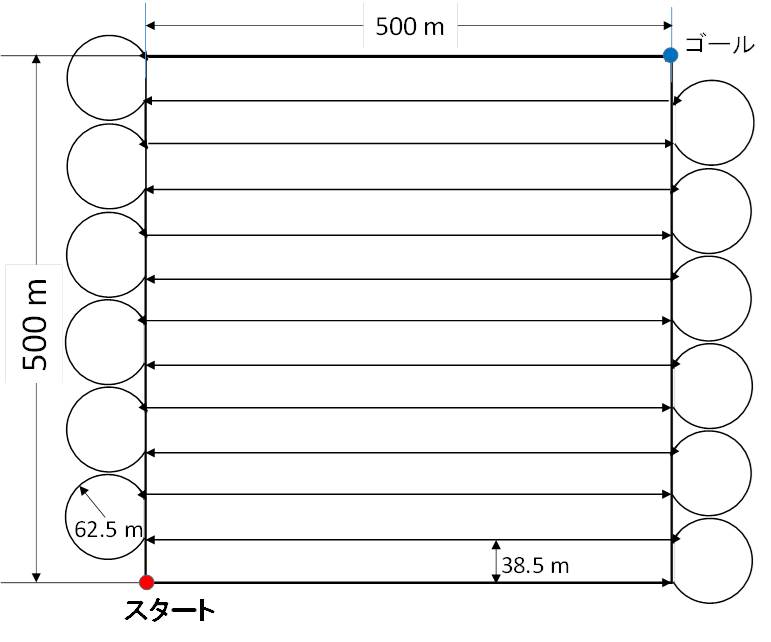
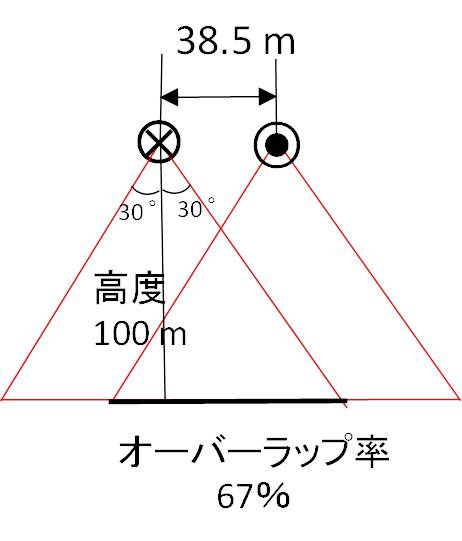
観測条件を考慮した飛行ルート及び観測のオーバーラップ率は下記を想定しています。
5.サブシステム目標性能
システムは,機体から送られる映像伝送系,機体の位置を監視する遠隔監視制御系,実際に飛行させる固定翼UAVの3つのサブシステムにより構成されています.
当研究室では,遠隔監視制御系は固定翼UAVに関する研究開発を担当しています.

遠隔監視制御系の無線通信について,下記の周波数,空中線電力を有する装置を開発しています.
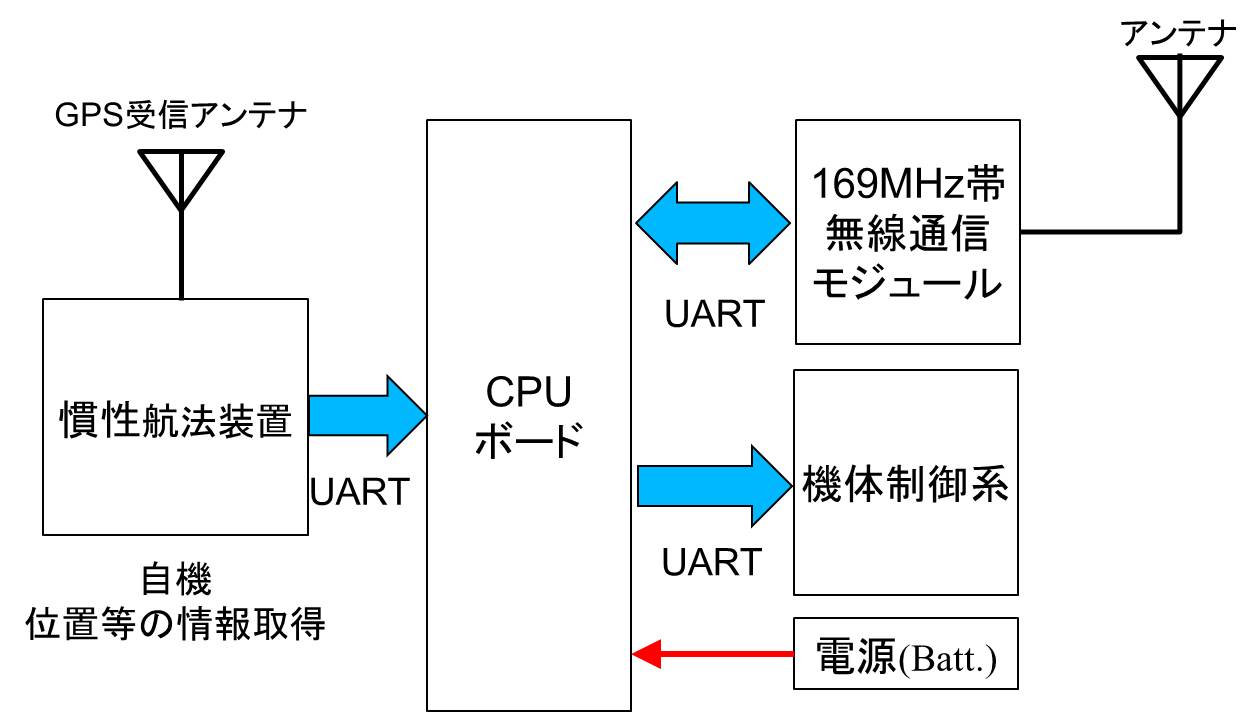
無線通信を用いて,慣性航法装置からのデータ,あるいは機体制御系からのデータを地上に伝送します.
右図の無線通信装置の概略は以下のようになっています。
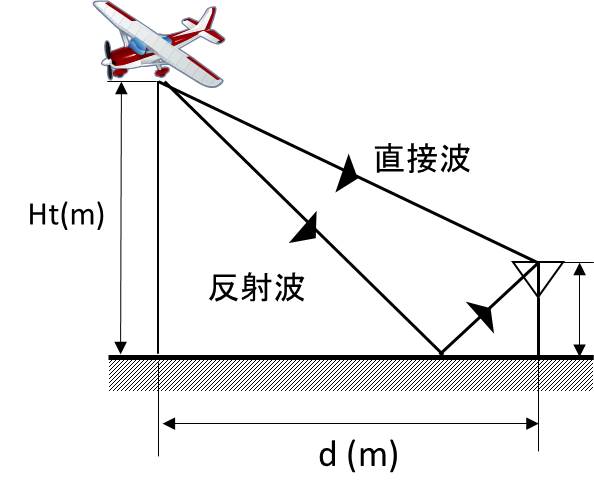
 上記無線通信装置の電波特性として,上空-地上間通信について,単純化し,電波伝搬特性を利用して2波モデルで検討しました.
上記無線通信装置の電波特性として,上空-地上間通信について,単純化し,電波伝搬特性を利用して2波モデルで検討しました.
UAVと地上局間の水平距離及び高度を50m,100m,
150mと変え,送受信のアンテナは0dBi,偏波面を水平と垂直に分けてシミュレーションを行いました.


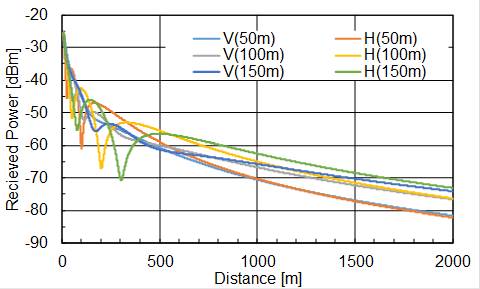
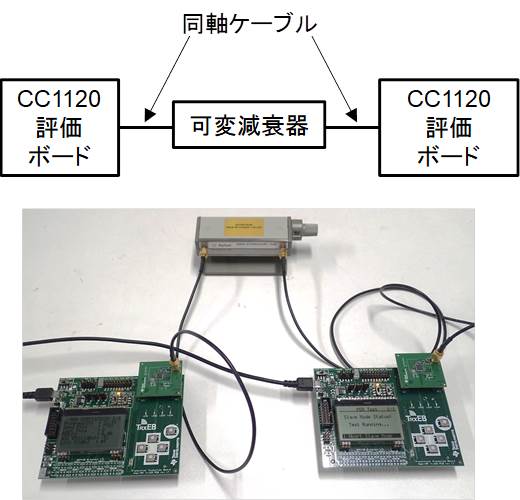
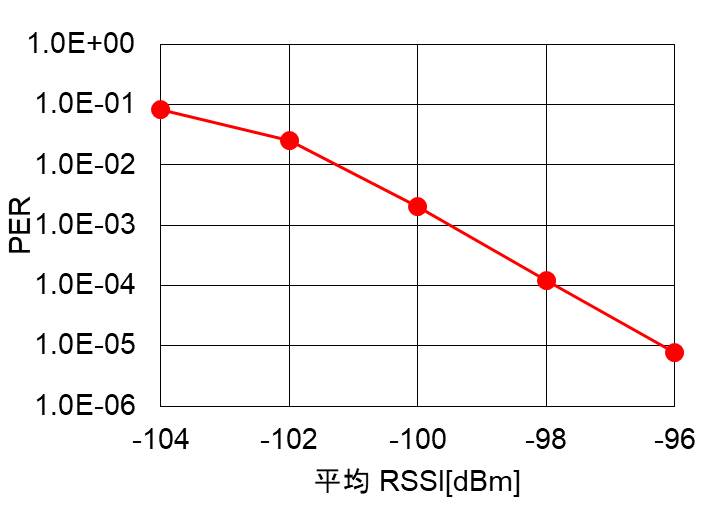
また,受信電力については下記実験結果より-100dBmでPER=10-2以下を確認しました.
平成30年度には169MHz帯の遠隔監視制御用無線通信装置を開発しました。無線基盤はサイズが35mm×55mm、重量は8.4g、バッテリは240g、アンテナを含めて300g以下になりました。外観と搭載側の装置構成を下図に示す。4値GFSKで伝送速度は最大200kdpsであり、送受とも同一の速度で通信します。占有帯域幅、帯域外、スプリアス領域の不要輻射レベルは、実験試験局の申請に当たり基準値以下で問題ないことを確認しています。
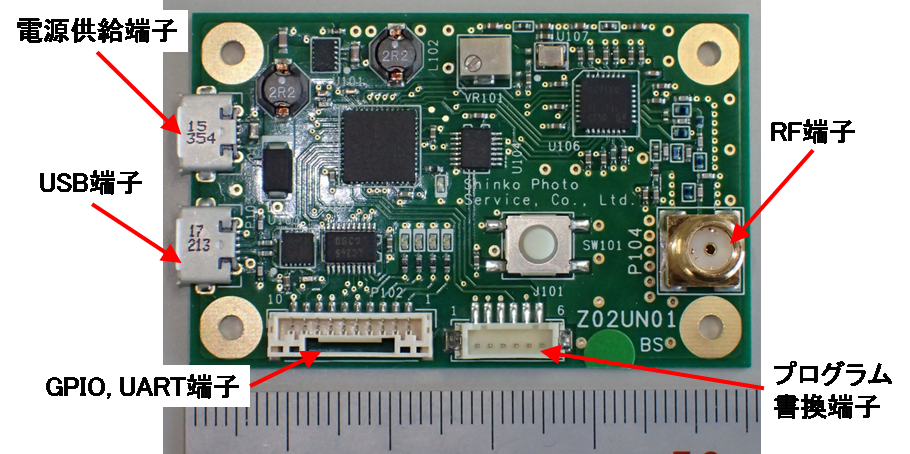

図 搭載機器外観と装置構成
UAV搭載用の169MHzの帯アンテナには下図に示す示すように水平尾翼に配置したベント型ダイポールアンテナを検討しました。本アンテナは直径2mmの銅線を用い、九電部にはフェライトコアを用いたソータバランスにて平衡-不平衡の変換を行っています。このアンテナの放射特性を電子航法研究所電波無響室で評価しました。結果アンテナが水平尾翼にあるため主翼の影響で前方と後方では2dB程度利得に差があること、横倒しにした場合も飛行機前方と背面、腹面とは4dBの利得さがありましたが、垂直面では1dBいないの差であることなどを確認しました。なお本無線基板は、開発依頼先の伸光写真サービス㈱によりマイクロウェーブ展にて出展し公表されています。

図 搭載アンテナ 外観
5.追尾アンテナ
追尾アンテナについて、想定飛行速度及び飛行ルート中最も厳しい追尾条件下での制御性能(追尾精度)を試作追尾アンテナシステム(雲台)、電動模型飛行機による飛行により確認し、設計の妥当性あるいは改善点を明確化した。追尾アンテナシステムの前ぽ30~60mの上空を手動にて電子模型飛行機を周回飛行させたところ、使用無線データ欠落の影響があるものの、本影響がない状況では最も角速度が大きくなる方位角で最大100deg./sの角速度を追従誤差6°程度で追尾できていることを確認しました。
2) 緊急時帰還飛行経路
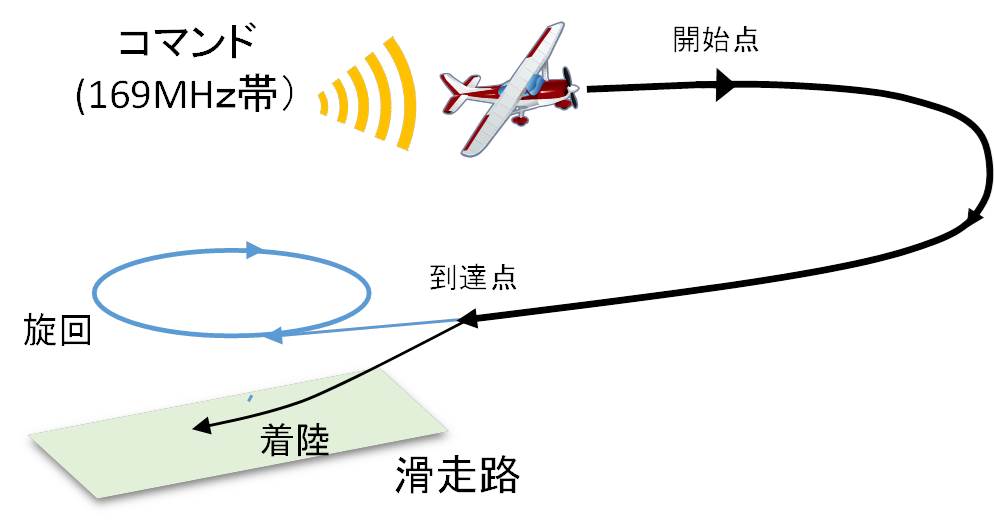
マルチコプターには“Go-Home機能”が標準装備されていますが,固定翼UAVには帰還に関する機能は装備されていません.そのため,本研究では,固定翼UAVの帰還技術の研究を行います.固定翼UAVは,マルチコプターと異なり旋回が必要で,旋回半径も旋回開始地点と帰還地点及びそれらの時の方位角によって異なります.
よって,帰還開始点と到達点の2点を決めて,2点境界値問題を解くことにより最短時間かつ最小のバンク角変化で帰還する最適帰還経路の生成をしました.
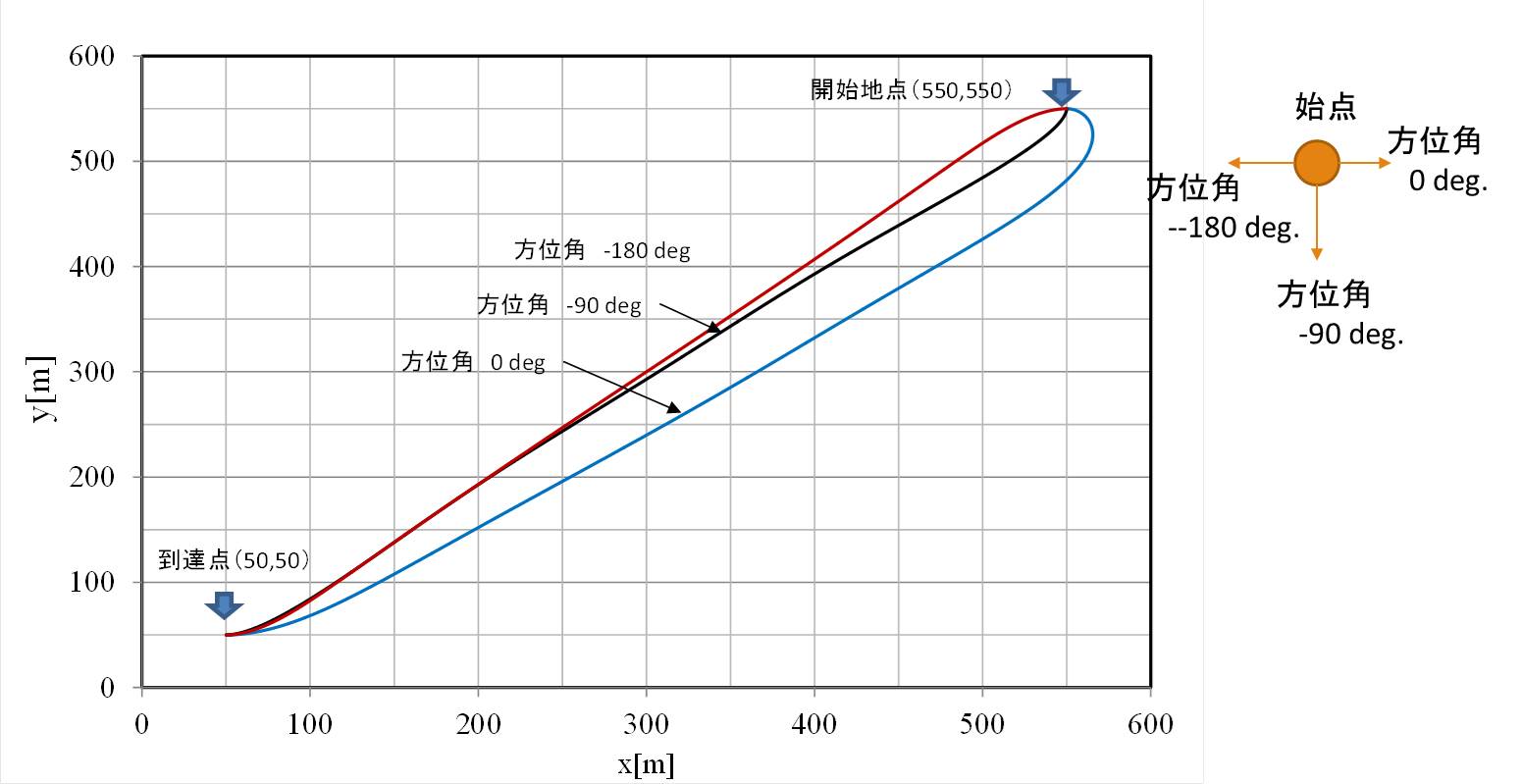
実際に計算した結果,始点方位角0,-90,-180(deg)の最適帰還飛行ルートはこのようになりました.尚,終点方位角は全て-180(deg)で行っています.
また,飛行範囲は(500m,500m)~(0m,0m)を想定して行っています.但し,バンク角 は84°程度と過大になる傾向が見られました.
29年度に検討した最適計算により得られる帰還経路は、リアルタイムでは解が得られないこと、また、旋回半径を達成するためのバンク角が80°近くであり現実的でないことから、平成30年度には現実的なバンク角30°に固定して、帰還ルートを旋回→直線飛行→旋回により近似するアルゴリズムを考案しました。本アルゴリズムを実際に誘導制御回路に実装し、飛行検証を行いました。この結果、下図に示すように経路からのずれはあるものの、旋回→直線飛行→旋回と設計通りの切り替えが行われたことを確認しました。経路からのずれについては、新たな制御系を付加することにより低減を図ります。

3) 固定翼UAVのペイロード検討
ラジコン飛行機の重量内訳
 固定翼UAVとしては定常飛行速度25m/s,飛行距離50km,離着陸距離70mの固定翼UAVに,1kg~2kgのサブシステムを搭載します.そのため,2種類のラジコン飛行機を用いて総重量6kgに対してペイロード2kg弱が可能であることを実際の飛行により実証しました.
固定翼UAVとしては定常飛行速度25m/s,飛行距離50km,離着陸距離70mの固定翼UAVに,1kg~2kgのサブシステムを搭載します.そのため,2種類のラジコン飛行機を用いて総重量6kgに対してペイロード2kg弱が可能であることを実際の飛行により実証しました.
4) 総合実証実験
1.目標性能を有するUAVの構築について
前項の通り、2種類の固定翼UAVを用いて実験を進めていきます。また、本機体搭載のエンジンの大きな振動が搭載慣性航法装置の計測に大きな誤差を発生させることが判明しました。そのため振動軽減効果が高い緩衝材及び装着方法を検討、耐振動対策を施しました。この結果、飛行速度は、20~30m/sで、設計飛行速度25m/sを達成できていることを確認しました。また、検証時の飛行時間は5分程度であり、この時搭載燃料200gの約半分の100gを消費していることから、400g程度の燃料を搭載することにより20分間飛行可能であると算定しました。
2.飛行実験農場の選定と事前準備事項について
飛行実験、特に映像伝送のための農場として、㈱渡辺農場様(所在:三笠市、総所有面積 150ha)に居力いただけることになりました。渡辺牧場様の所有している農場のうち、飛行に適した条件を有する8はの農場を選択しました。この選定過程において、固定翼UAVの離着陸させるために使用する農道の整備が必要であるため、これを行います。映像伝送以外のUAVの飛行制御性能確認はこれまで道理白老滑空場(幅30m、長さ800m)及びその周辺地域での飛行により行います。

図 実験用農場(渡辺農場様)
謝辞
本研究は総務省SCOPE「広大な農地の短時間観測を可能とする固定翼自律UAVを用いた映像伝送技術の研究開発」により実施しております。

